
ຜະລິດຕະພັນ

carton box gantry auto palletizer
ລາຍລະອຽດສັ້ນ:
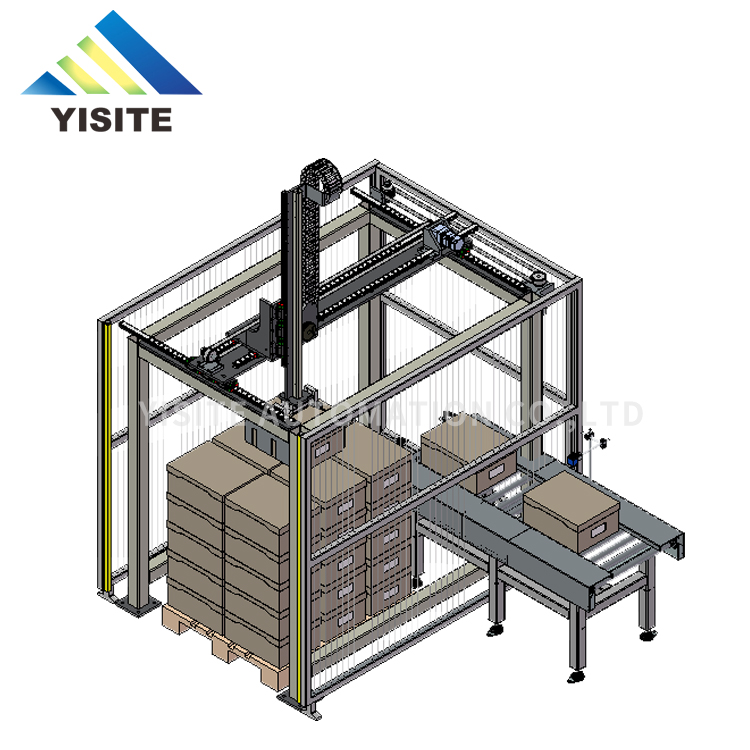
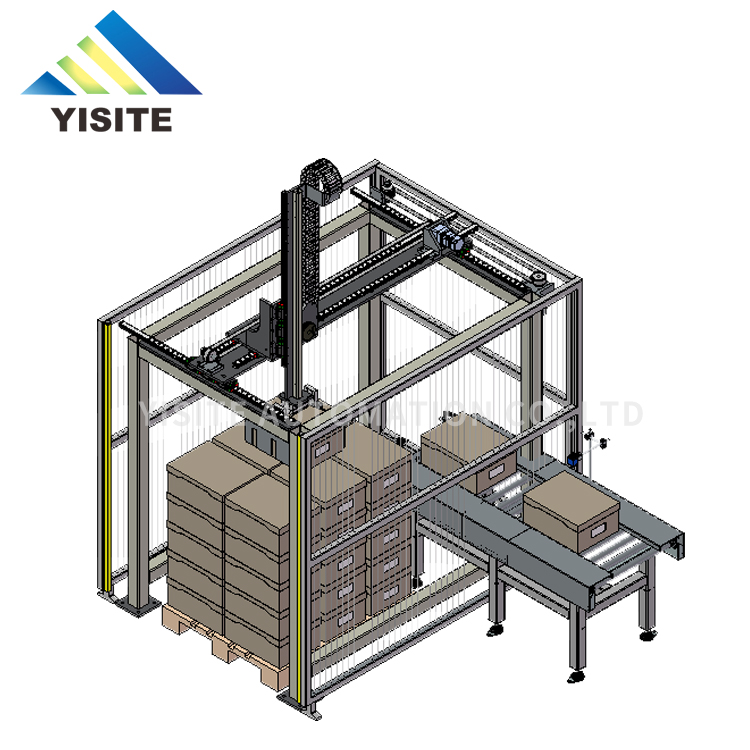
carton box gantry auto palletizer ແນະນໍາຜະລິດຕະພັນ: ຫນ່ວຍບໍລິການຕົ້ນຕໍຂອງ palletizer ແມ່ນປະກອບດ້ວຍ trolley ທີ່ສາມາດເດີນທາງໄປຂ້າງຫນ້າແລະຖອຍຫລັງ, ກອບ, ແລະເວທີ carrier ທີ່ສາມາດຍົກຂຶ້ນແລະລົງໄດ້. ຂະຫນາດແລະ fixcture ສາມາດປັບແຕ່ງໄດ້.
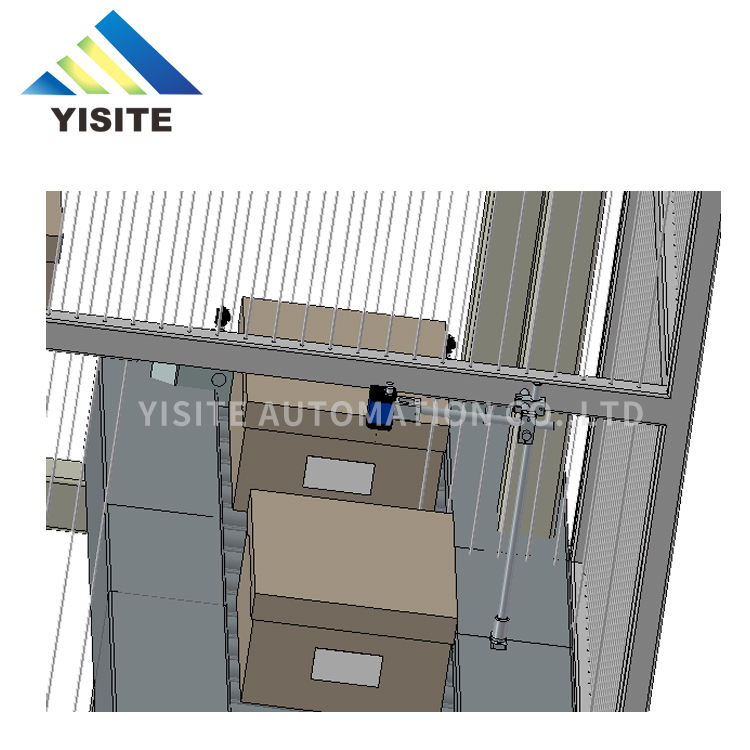
carton box gantry auto palletizer is with a special design of pneumatic grip, adjustable pressure, installed with pressure buffer valve, so that the grasp action with the induction mechanism , ອັດຕະໂນມັດສາມາດຮັບຮູ້ວັດຖຸ, ແລະແຈ້ງໃຫ້ສູນຄວບຄຸມສໍາລັບການຈັບວັດຖຸ.

ກ່ຽວກັບພວກເຮົາ

ພວກເຮົາເປັນຜູ້ຜະລິດອຸປະກອນອັດຕະໂນມັດແບບມືອາຊີບທີ່ກໍາຫນົດເອງ. ຜະລິດຕະພັນຂອງພວກເຮົາປະກອບມີ depalletizer, ເອົາແລະວາງເຄື່ອງຫຸ້ມຫໍ່, palletizer, ຄໍາຮ້ອງສະຫມັກປະສົມປະສານຫຸ່ນຍົນ, ການໂຫຼດແລະ unloading manipulators, carton forming, carton sealing, pallet dispensper, wrapping machine and other automation solutions for back-end packaging line.
ພື້ນທີ່ໂຮງງານຂອງພວກເຮົາແມ່ນປະມານ 3,500 ຕາແມັດ. ທີມງານດ້ານວິຊາການຫຼັກມີປະສົບການສະເລ່ຍ 5-10 ປີໃນເຄື່ອງຈັກອັດຕະໂນມັດ, ລວມທັງ 2 ວິສະວະກອນອອກແບບກົນຈັກ. ວິສະວະກອນການຂຽນໂປລແກລມ 1 ຄົນ, ພະນັກງານປະກອບ 8 ຄົນ, ຄົນແກ້ບັນຫາຫຼັງການຂາຍ 4 ຄົນ ແລະ ຄົນງານອີກ 10 ຄົນ.
ຫຼັກການຂອງພວກເຮົາແມ່ນ "ລູກຄ້າທໍາອິດ, ຄຸນນະພາບທໍາອິດ, ຊື່ສຽງທໍາອິດ", ພວກເຮົາສະເຫມີຊ່ວຍໃຫ້ລູກຄ້າຂອງພວກເຮົາ "ເພີ່ມກໍາລັງການຜະລິດ, ຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍແລະປັບປຸງຄຸນນະພາບ" ພວກເຮົາພະຍາຍາມກາຍເປັນຜູ້ສະຫນອງຊັ້ນນໍາໃນອຸດສາຫະກໍາເຄື່ອງຈັກອັດຕະໂນມັດ.
Truss XYZ ເຕັມອັດຕະໂນມັດ carton bos stacking manipulator
1. ອົງປະກອບຂອງເຄື່ອງ stacker
ເຄື່ອງ palletizing ແມ່ນປະກອບດ້ວຍກອບການຕິດຕັ້ງ, ລະບົບການຈັດຕໍາແຫນ່ງ, ລະບົບຂັບ servo, ລະບົບການຄວບຄຸມ, ການຄວບຄຸມໄຟຟ້າແລະລະບົບການແຜ່ກະຈາຍ, ອຸປະກອນປ້ອງກັນຄວາມປອດໄພ, ແລະອື່ນໆ, ປະກອບດ້ວຍລະບົບການຈັດຕໍາແຫນ່ງອາຫານອັດຕະໂນມັດ.(ທາງເລືອກລະບົບການສະຫນອງ stack ອັດຕະໂນມັດ)
2. stacking ເຄື່ອງ rack mounting
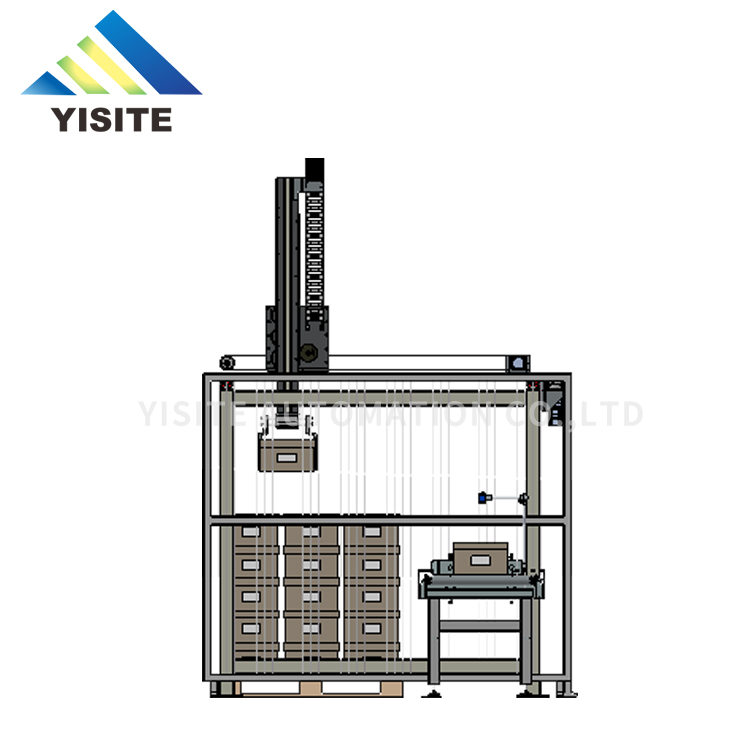
ເນື່ອງຈາກວ່າຄວາມໄວການເຄື່ອນໄຫວຂອງ stacker ແມ່ນໄວຫຼາຍ, ລັດເລີ່ມຕົ້ນມີຜົນກະທົບຢ່າງຫຼວງຫຼາຍຕໍ່ກອບ mounting. ກອບການຕິດຕັ້ງຕ້ອງມີຄວາມເຄັ່ງຄັດດີຫຼາຍເພື່ອຮັບປະກັນການດໍາເນີນງານທີ່ຫມັ້ນຄົງຂອງ stacking, ດັ່ງນັ້ນພວກເຮົາໄດ້ອອກແບບໂຄງສ້າງກອບເຫຼັກ welded ເປັນ ກອບສະຫນັບສະຫນູນ.
3. ລະບົບການຈັດຕໍາແຫນ່ງເຄື່ອງ stacker palletizer
ລະບົບການຈັດຕໍາແຫນ່ງ stacker ເປັນຫຼັກຂອງອຸປະກອນທັງຫມົດ, ເປັນຜະລິດຕະພັນຂອງບໍລິສັດ Yaskawa (ຍີ່ປຸ່ນ), ຄວາມໄວການເຄື່ອນໄຫວໄວ, ແລະຄວາມຖືກຕ້ອງຂອງການຄ້າງຫ້ອງແມ່ນສູງ, X, Y, Z ສາມພິກັດແມ່ນເລືອກສໍາລັບການສົ່ງສາຍເຂັມຂັດແຂ້ວ synchronous, ປະສານງານດຽວ. ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊໍ້າຄືນແມ່ນ 0.1 ມມ, ຄວາມໄວໃນການເຄື່ອນໄຫວເສັ້ນໄວ: 1000 ມມ/ວິນາທີ. ແກນ X ເປັນລະບົບການຈັດຕໍາແຫນ່ງດ່ຽວທີ່ມີຄວາມຍາວ 3000 ມມ ແລະ ໄລຍະຫ່າງຂອງ 1935 ມມ. ເຄື່ອງສົ່ງສັນຍານ synchronous ຮັບປະກັນການເຄື່ອນໄຫວ synchronous ຂອງສອງລະບົບການຈັດຕໍາແຫນ່ງແລະຖືກຂັບເຄື່ອນໂດຍ servo motor 1500W. ສໍາລັບການຈັບຄູ່ແຮງບິດຂັບລົດແລະ inertia, ມີເຄື່ອງຫຼຸດເກຍ planetary ຄວາມແມ່ນຍໍາສູງ.
ແກນ Y ໃຊ້ລະບົບການຈັດຕໍາແຫນ່ງຄູ່. ເຫດຜົນວ່າເປັນຫຍັງຫນ່ວຍງານການຈັດຕໍາແຫນ່ງທີ່ມີພາກສ່ວນຂ້າມຂະຫນາດໃຫຍ່ດັ່ງກ່າວແມ່ນຍ້ອນວ່າແກນ Y ແມ່ນການສະຫນັບສະຫນູນສອງເທົ່າທີ່ມີໂຄງສ້າງຂອງ suspension ກາງ. ຖ້າພາກສ່ວນຂ້າມທີ່ເລືອກບໍ່ພຽງພໍ, ຄວາມຫມັ້ນຄົງຂອງການເຄື່ອນໄຫວຂອງຫຸ່ນຍົນຈະບໍ່ຮັບປະກັນ, ແລະຫຸ່ນຍົນຈະສັ່ນສະເທືອນເມື່ອເຄື່ອນທີ່ດ້ວຍຄວາມໄວສູງ. ສອງຫນ່ວຍຈັດຕໍາແຫນ່ງແມ່ນໃຊ້ຂ້າງຄຽງເພື່ອ clip ແກນ Z ຢູ່ເຄິ່ງກາງແລະການດຸ່ນດ່ຽງ. ໂຫຼດໄດ້ດີ. ຮູບແບບການຕິດຕັ້ງນີ້ມີສະຖຽນລະພາບທີ່ດີຫຼາຍ. ລະບົບການຈັດຕໍາແຫນ່ງທັງສອງແມ່ນຂັບເຄື່ອນດ້ວຍມໍເຕີ servo 1500W, ພ້ອມກັບເຄື່ອງຫຼຸດເກຍດາວເຄາະທີ່ມີຄວາມແມ່ນຍໍາສູງສໍາລັບການຈັບຄູ່ແຮງບິດຂັບແລະ inertia.
ລະບົບການຈັດຕໍາແຫນ່ງແກນ Z ມີຄວາມຫນັກແຫນ້ນແລະຫມັ້ນຄົງ. ໂດຍທົ່ວໄປແລ້ວຜະລິດຕະພັນມີການສ້ອມແຊມ slider ແລະການເຄື່ອນໄຫວຂຶ້ນແລະລົງໂດຍລວມ. ມໍເຕີ servo ຕ້ອງການປັບປຸງວັດຖຸຢ່າງໄວວາ, ເຊິ່ງຈໍາເປັນຕ້ອງເອົາຊະນະແຮງໂນ້ມຖ່ວງແລະຄວາມເລັ່ງທີ່ຍິ່ງໃຫຍ່, ແລະຕ້ອງການພະລັງງານຫຼາຍກວ່າເກົ່າ. .ໃນການປະຕິບັດ, ພວກເຮົາເລືອກມໍເຕີ servo 2000W, ພ້ອມກັບເຄື່ອງຫຼຸດເກຍດາວເຄາະທີ່ມີຄວາມແມ່ນຍໍາສູງ. ແກນ A ແມ່ນແກນຫມຸນ.
4. ລະບົບຂັບ Servo
ເຄື່ອງ manipulator stacking ນໍາໃຊ້ servo motor ທີ່ມີຫນ້າທີ່ດິຈິຕອນ. shaft motor ແຕ່ລະແມ່ນອຸປະກອນທີ່ມີ servo motor ແລະ reducer, ສີ່ servo motor ແລະສີ່ reducer, ລວມທັງມໍເຕີແນວຕັ້ງທີ່ມີ lock servo motor.
5. ການຈັບສະແຕນເລດ
stacking ທີ່ມີການອອກແບບພິເສດຂອງການຈັບ pneumatic, ຄວາມກົດດັນທີ່ສາມາດປັບໄດ້, ອຸປະກອນທີ່ມີວາວ buffer ຄວາມກົດດັນ, ດັ່ງນັ້ນການປະຕິບັດການຈັບທີ່ປະກອບດ້ວຍກົນໄກ induction, ອັດຕະໂນມັດສາມາດຮັບຮູ້ວັດຖຸ, ແລະແຈ້ງໃຫ້ສູນຄວບຄຸມສໍາລັບການຈັບວັດຖຸ.
6, ລະບົບການຄວບຄຸມ
ລະບົບການຄວບຄຸມປະກອບດ້ວຍ PLC ຂະຫນາດໃຫຍ່ແລະຫນ້າຈໍສໍາຜັດ. ລະບົບມີຄວາມສາມາດໃນການຂຽນໂປລແກລມທີ່ມີປະສິດທິພາບ. ດ້ວຍຮູບແບບທີ່ແຕກຕ່າງກັນຂອງ palletizing, ລະບົບສາມາດກໍານົດໂຄງການປອມຕ່າງໆ, ແລະເພື່ອທົດແທນໂຄງການທີ່ສອດຄ້ອງກັນສາມາດດໍາເນີນການໃນຫນ້າຈໍສໍາຜັດໄດ້.
7, ອຸປະກອນຄວາມປອດໄພ
ເຄື່ອງມີຫນ້າທີ່ເຕືອນແລະເຕືອນຄວາມຜິດ, ແລະທຸກຄວາມຜິດສາມາດສະທ້ອນໃຫ້ເຫັນຢ່າງຖືກຕ້ອງກ່ຽວກັບສະຖານທີ່ສະເພາະ, ງ່າຍແລະໄວທີ່ຈະລົບລ້າງຄວາມຜິດ, ຕົ້ນຕໍລວມທັງ: ຫນ້າທີ່ປ້ອງກັນການ collision ຫຸ່ນຍົນ; ການຕິດຕັ້ງ workpiece ໃນການຊອກຄົ້ນຫາສະຖານທີ່; ການປົກປ້ອງຄວາມປອດໄພຂອງຫນ້າຈໍແສງສະຫວ່າງ.
ຕົວກໍານົດການດ້ານວິຊາການ
1. ຮູບແບບເຄື່ອງຈັກ: YST-MD1500
2. ຄວາມອາດສາມາດ stacking: 200-500 ກ່ອງ / H
3. ກອບ : SS41 (A3 ການສີດພາດສະຕິກການປິ່ນປົວເຫຼັກກ້າ) shaft S45C ເຫຼັກກ້າ.
4. ພະລັງງານ: AC, 3 ໄລຍະ, 380V, 9KW 50HZ
5. ການບໍລິໂພກອາກາດ: 500NL / MIN (ການນໍາໃຊ້ທາງອາກາດ: 5-6kg / cm2)
6. ຂະຫນາດອຸປະກອນ: (L) 3500mm (W) 2250mm (H) 2800mm (ຂຶ້ນກັບການອອກແບບການຈັດວາງຕົວຈິງ)
7. ນ້ໍາຫນັກອຸປະກອນ: 1,500 kg


ການຕັ້ງຄ່າປະໂຫຍດຕົ້ນຕໍ
1. ມໍເຕີ servo ຍີ່ຫໍ້ Yaskawa
2. ເຄື່ອງຫຼຸດຄວາມໄວຍີ່ຫໍ້ໄຕ້ຫວັນ
3. ບໍລິສັດ Mitsubishi (Japan) PLC
4. Contactor ແລະ switches ຈະຖືກນໍາໃຊ້ໃນ Schneider
5. ເຊັນເຊີ Omron photoelectric
6. ການຄວບຄຸມການໂຕ້ຕອບການສະແດງການປະຕິບັດແລະສະຖານະການປຸກແລະຫນ້າທີ່ປຸກ
7. ເຄື່ອງແປງຄວາມຖີ່ຂອງຍີ່ຫໍ້ Yaskawa
8. ກອບແລະກະດານຂ້າງແມ່ນເຮັດໂດຍເຫຼັກກາກບອນ
9. Taiwan AirTac Pneumatic ອົງປະກອບ
10. Italian PIAB ຍີ່ຫໍ້ Sucker









